Descripción del ejercicio
Hemos denominado este ejemplo como "El coche fantástico" en memoria de la serie de
TV de los años 80 en la que el famoso David Hasselhoff tenía una máquina de IA
conduciendo su Pontiac. El coche estaba equipado con gran cantidad de LED-s de todos
los tamaños posibles que realizaban efectos parpadeantes.
De esta manera hemos decidido, con el objetivo de aprender programación secuencial y
buenas técnicas para programar la placa E/S, sería interesante usar el coche fantástico
como una metáfora.
Este ejemplo hace uso de 6 LED-s conectados a los PIN 2 a 7 de la placa mediante
resistencias de 220 Ohmios. El primer código de ejemplo hace parpadear a los LED en
secuencia de uno en uno, utilizando sólo las funciones
digitalWrite(pinNum,HIGH/LOW) y delay(time). El segundo ejemplo muestra como
usar una secuencia de control for(;;;) para hacer lo mismo, pero en menos líneas de
código. El tercer y último ejemplo se centra en el efecto visual de apagar y encender los
LED-s de una forma más suave.
Elementos necesarios:
· 6 LED-s.
· 6 resistencias de 220 Ohmios.
· Una placa protoboard.
· Cables para realizar las conexiones
Ejemplo 1
Código fuente
/* El coche fantástico 1
* ---------------------
*
* Básicamente una extensión del LED parpadeante.
*
*
* (cleft) 2005 K3, Malmo University
* @author: David Cuartielles
* @hardware: David Cuartielles, Aaron Hallborg
*/
int pin2 = 2; // PIN-es de los LED
int pin3 = 3;
int pin4 = 4;
int pin5 = 5;
int pin6 = 6;
int pin7 = 7;
int timer = 100; // Temporizador
void setup(){
pinMode(pin2, OUTPUT); // Configuración de los PIN-es como salida
pinMode(pin3, OUTPUT);
pinMode(pin4, OUTPUT);
pinMode(pin5, OUTPUT);
pinMode(pin6, OUTPUT);
pinMode(pin7, OUTPUT);
}
void loop() {
digitalWrite(pin2, HIGH); // Enciende y apaga secuencialmente LED-s
delay(timer);
digitalWrite(pin2, LOW);
delay(timer);
digitalWrite(pin3, HIGH);
delay(timer);
digitalWrite(pin3, LOW);
delay(timer);
digitalWrite(pin4, HIGH);
delay(timer);
digitalWrite(pin4, LOW);
delay(timer);
digitalWrite(pin5, HIGH);
delay(timer);
digitalWrite(pin5, LOW);
delay(timer);
digitalWrite(pin6, HIGH);
delay(timer);
digitalWrite(pin6, LOW);
delay(timer);
digitalWrite(pin7, HIGH);
delay(timer);
digitalWrite(pin7, LOW);
delay(timer);
digitalWrite(pin6, HIGH);
delay(timer);
digitalWrite(pin6, LOW);
delay(timer);
digitalWrite(pin5, HIGH);
delay(timer);
digitalWrite(pin5, LOW);
delay(timer);
digitalWrite(pin4, HIGH);
delay(timer);
digitalWrite(pin4, LOW);
delay(timer);
digitalWrite(pin3, HIGH);
delay(timer);
digitalWrite(pin3, LOW);
delay(timer);
}
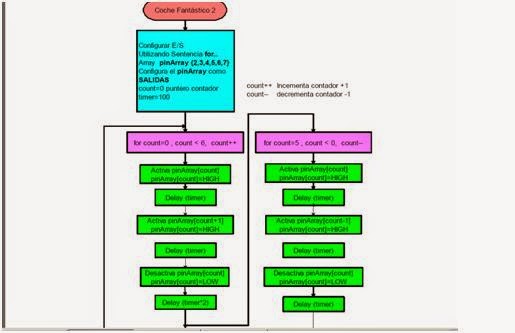
Ejemplo 2
En este caso las luces se encenderán y apagaran todas en un sentido y luego , acabada la
secuencia en sentido contrario.
/* El coche fantástico 2
* ---------------------
*
* Reduciendo las líneas de código usando un for(;;).
*
*
* (cleft) 2005 K3, Malmo University
* @author: David Cuartielles
* @hardware: David Cuartielles, Aaron Hallborg
*/
int pinArray[] = {2, 3, 4, 5, 6, 7}; // Define el array de pines
int count = 0; // Contador
int timer = 100; // Temporizador
void setup(){
for (count=0;count<6;count++){ // Configuramos todos los PIN-es
pinMode(pinArray[count], OUTPUT);
}
}
void loop() { // Enciende y apaga secuencialmente los LED-s
for (count=0;count<6;count++) { // utilizando la secuencia de control for(;;)
digitalWrite(pinArray[count], HIGH); // Recorrido de ida
delay(timer);
digitalWrite(pinArray[count], LOW);
delay(timer);
}
for (count=5;count>=0;count--) {
digitalWrite(pinArray[count], HIGH); // Recorrido de vuelta
delay(timer);
digitalWrite(pinArray[count], LOW);
delay(timer);
}
}
Ejemplo 3
En este caso el efecto que se crea es una estela visual muy vistosa.
/* El coche fantástico 3
* ---------------------
*
* Este ejemplo se centra en el efecto visual.
*
*
* (cleft) 2005 K3, Malmo University
* @author: David Cuartielles
* @hardware: David Cuartielles, Aaron Hallborg
*/
int pinArray[] = {2, 3, 4, 5, 6, 7}; // PIN-es
int count = 0; // Contador
int timer = 30; // Temporizador
void setup(){
for (count=0;count<6;count++) { // Configuramos todas los PIN-es de golpe
pinMode(pinArray[count], OUTPUT);
}
}
void loop() {
for (count=0;count<5;count++) { // Enciende los LED creando una estela visual
digitalWrite(pinArray[count], HIGH);
delay(timer);
digitalWrite(pinArray[count + 1], HIGH);
delay(timer);
digitalWrite(pinArray[count], LOW);
delay(timer*2);
}
for (count=5;count>0;count--) {
digitalWrite(pinArray[count], HIGH);
delay(timer);
digitalWrite(pinArray[count - 1], HIGH);
delay(timer);
digitalWrite(pinArray[count], LOW);
delay(timer*2);
}
}